Shortest Path Demo with Obstacle Avoidance
Visualizing N robots clearing an acre of salt cedar (discussion only).
This demo visualizes how multiple robots might plan their paths while clearing
a one-acre grid of salt cedar with obstacles in the way. It is meant for
discussion only, to illustrate why routing, parallel work, and obstacle
avoidance change mission time and path efficiency. It does not represent an
optimized fleet planner, but it is a useful way to reason about coordination
and pathing tradeoffs in the field.
Open the shortest path demo.
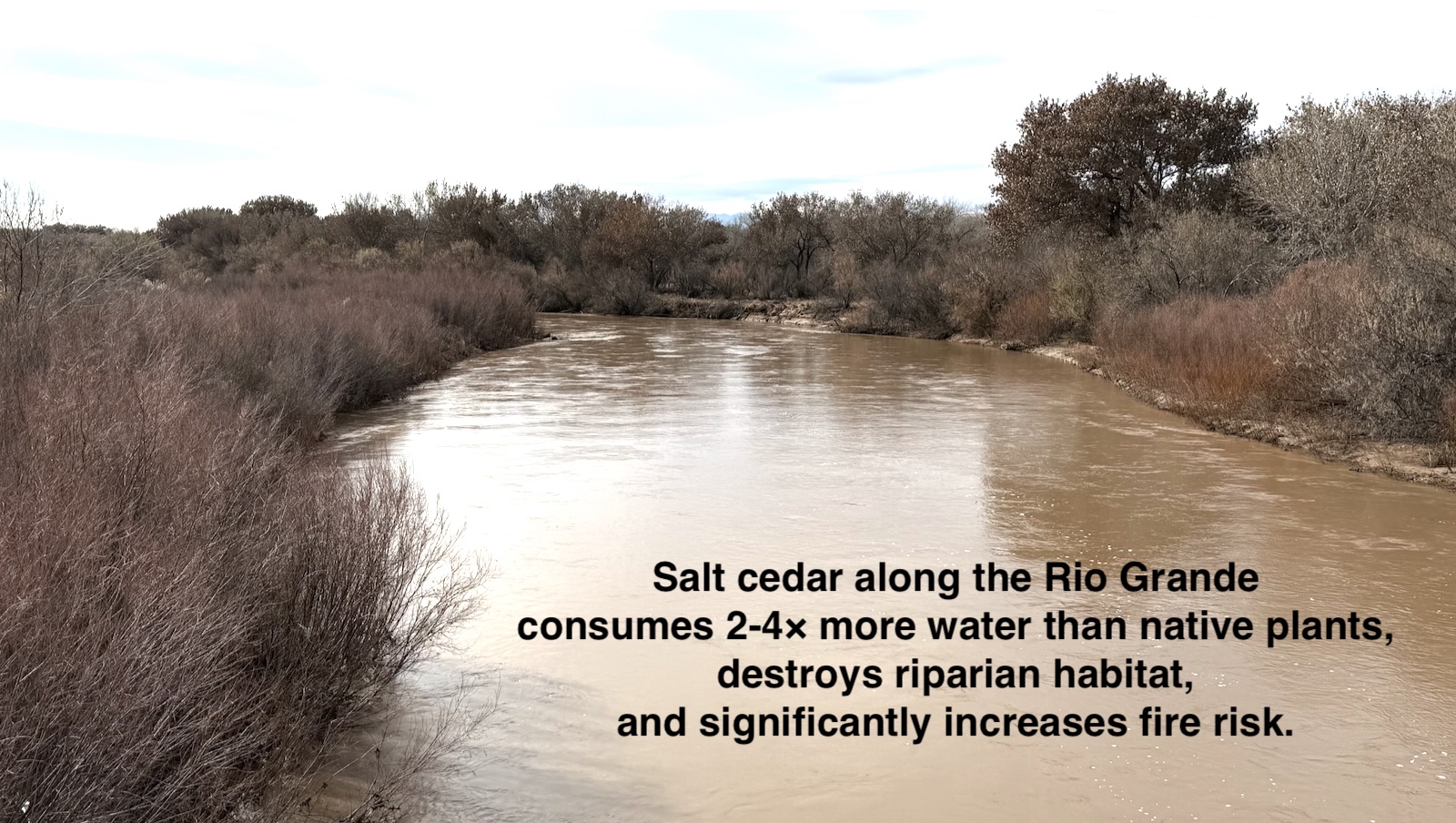
Site Visit with MRGCD: Rio Grande
Conducted a site visit in December 2025 with the Middle Rio Grande Conservancy District. Observed and documented their current efforts
in removing the salt cedar along the Rio Grande. MRGCD has been actively managing invasive species to restore native vegetation and improve water flow.
Their approach combines mechanical removal with targeted herbicide application to effectively control tamarisk populations.
Salt Cedar: The Case For Automated Removal
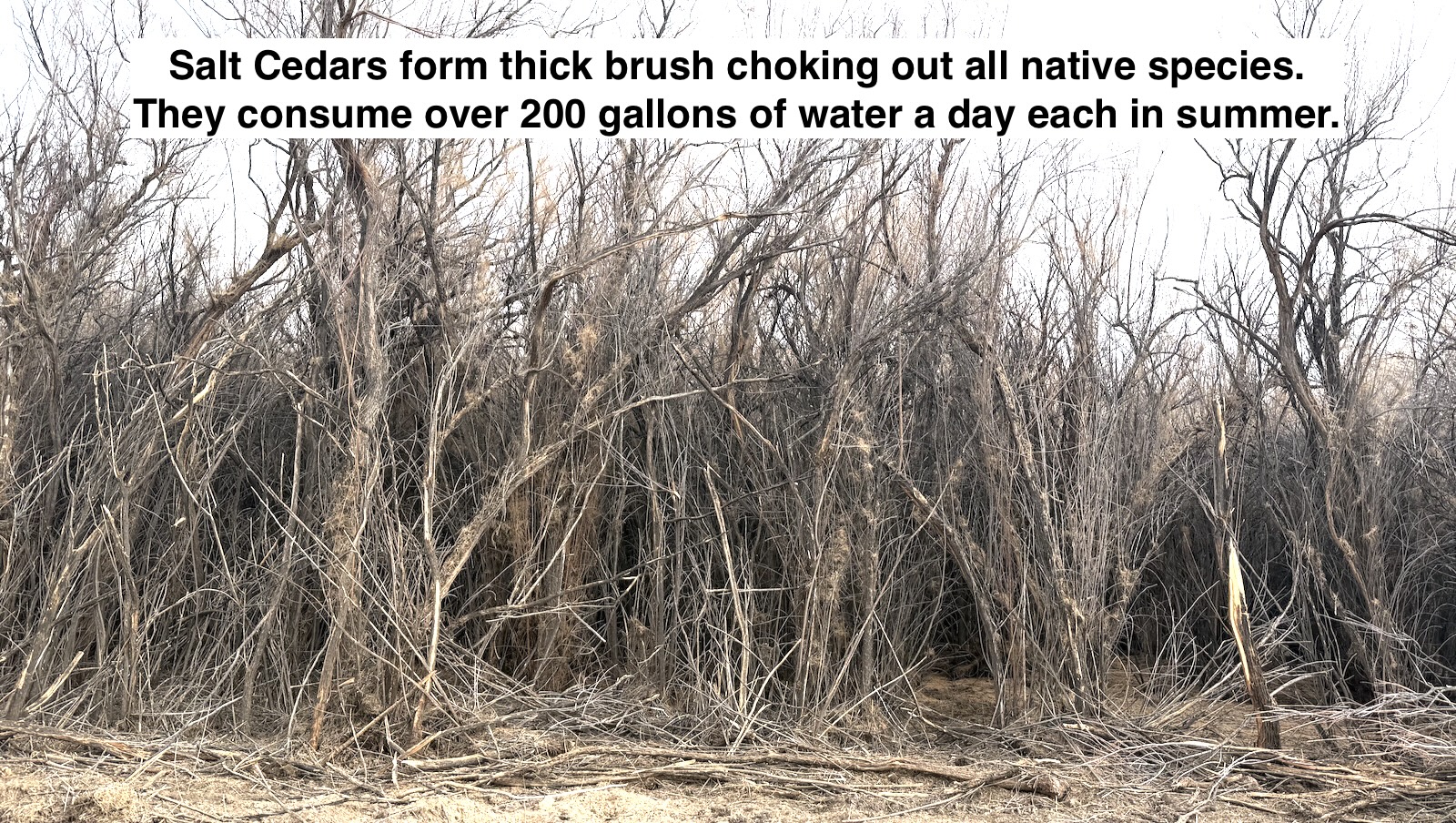
- Salt Cedar is a pervasive invasive species in the American Southwest, particularly along riparian corridors like the Rio Grande.
- It outcompetes native vegetation, consumes large amounts of water, and alters soil salinity.
- Effective removal is critical for ecosystem restoration, but current methods are labor-intensive and costly.
- By automating the removal process with robotics, we aim to increase efficiency, reduce costs, and minimize environmental impact.
- Salt Cedar removal alone could yield $11 billion in economic benefit over 55 years through water conservation, restored land values, and reduced management costs.
- Current manual removal methods are prohibitively expensive at scale, making automation essential for achieving meaningful environmental and economic impact across affected regions.
Bureau of Land Management: Meeting and Current Methods
Takeaways from discussing invasive species with BLM.
We spoke to BLM Invasive Species Specialist about their current methods for managing invasive plants. Due to the large amount of
land they oversee, they primarily rely on chemical treatments. Mechanical removal is used in select areas but is limited by cost and labor availability.
Much of the manual invasive removal is done at public sites by volunteers.
There is interest in exploring robotic solutions to supplement their current methods, particularly for areas that are difficult to access or to sensitive to treat
with chemicals.